autonomous robot
me218b course project
technology: HC12 microprocessor
dimensions: 12" L x 12" W x 12" H
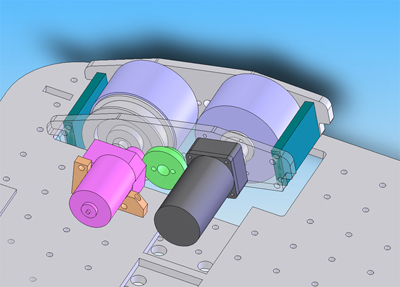
Every piece of mechanical hardware that was added to the
robot was first designed and integrated virtually in SolidWorks.
Using computer-aided design (CAD), we were able to ensure
proper fit and range of motion before assembly. Here, we
can see how the transmission
assembly is situated into the robot's base plate.